There’s a saying that good judgement comes from experience and experience comes from poor judgement. After the total loss of my first FPV plane, I realized the necessity of including several layers of redundancies both to my ability to remain in control of the aircraft as well as being able to recover it in the event of a crash outside line-of-sight. Here is what I settled on.
Control Improvements:
1. UHF LRS (Long Range control System)
I decided on Dragonlink’s 433MHz UHF transmitter to replace my shorter-ranged 2.4GHz FrSky system.

As one of the two direct contributors to Icarus’ loss, replacing the control link was something that should have been done from the start. I can’t even say I wasn’t warned – this is common advice on RCGroups for folks transitioning to FPV flying and the longer range flights it often leads to. Alternatively, I could have gone with EzUHF, OpenLRS, or Chainink. All of these products perform within a similar envelope, but each has its own ecosystem of accessories. This is something to keep in mind if an integrated OSD or antenna-tracker are in your future.
2. 1.3GHz Video
I switched from omnidirectional, circular-polarized 5.8GHz video to 1.3GHz.
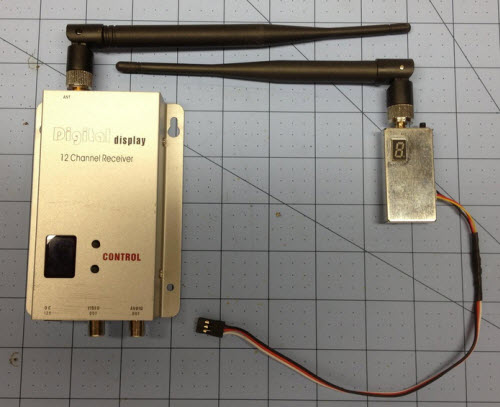
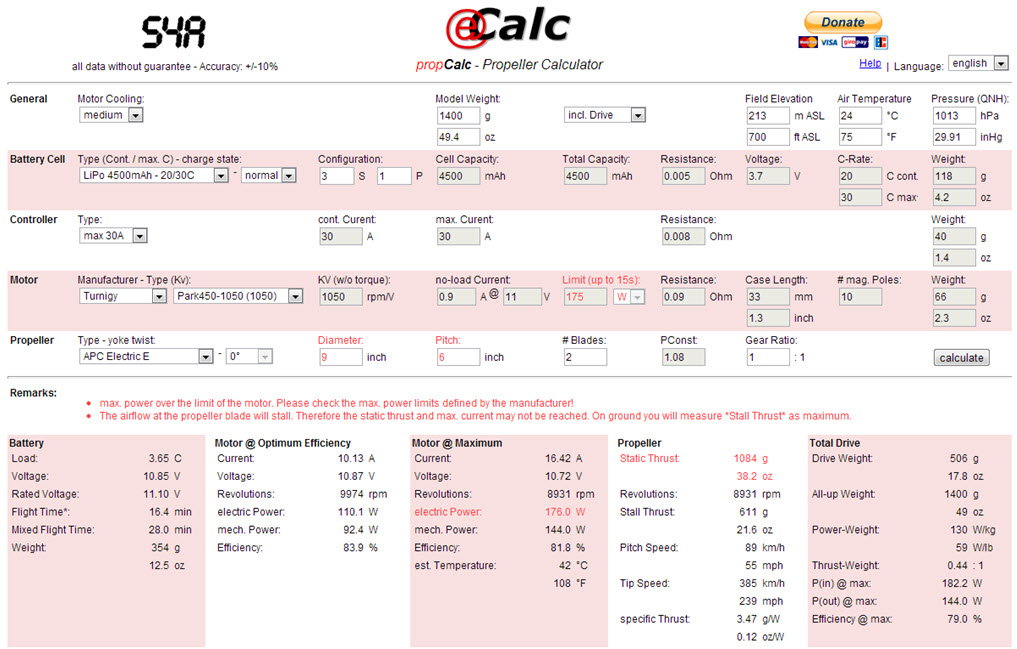
The lower frequency provides greater range and object penetration. I also bumped the VTX power up from 250mW to 600mW, which while not as effective as increasing antenna gain, should still make a noticeable improvement to range. The VRX will now be a standalone unit, rather than a module integrated into my FatShark goggles, which makes it easier to use larger antennas.
3. Directional Antenna
I actually went back to linear polarization for the time being, mostly to cut costs. Currently, I have a DIY “Inverted-Vee” antenna on the transmitter, mounted on the tail of the Skywalker. I use a standard 6dBi dipole antenna on the receiver, with the option to switch to a ReadyMadeRC 8dBi patch antenna that is optimized for 1280MHz.
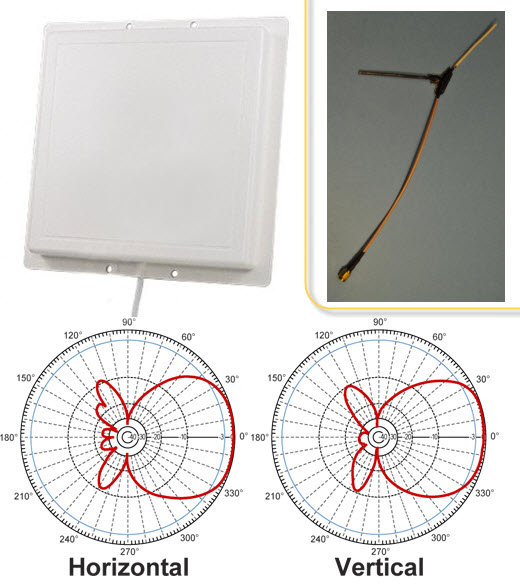
Using a directional antenna will more than double the video link’s range. For flights that will remain within a 1mi radius, a directional antenna adds additional risk (flying outside the coverage pattern), but for flights that are well-planned and aim to cover a linear distance away from the launch point, they are ideal.
4. OSD with RTH
Of all the things I regret having on the Icarus, it was an autopilot.

The Cyclops Storm OSD integrates both basic autopilot (return to home) and pilot assist features (heading hold, stabilization) via a tiny AHRS (Attitude and heading reference system). In addition, this data is passed through to an on screen display. The Storm’s jack-of -all-trades simplicity won out over the endlessly-customizable and feature-rich, ArduPilot, which requires a separate OSD board and (to utilize its full potential) a laptop and wireless telemetry TX/RX to view and send commands to the autopilot in real-time. Dragon’s own DOSD was also in the running, but its price exceeded both Storm and ArduPilot, while offering a feature set somewhere between the two.
5. Fixed Ground Station / FatShark 5.8GHz Relay
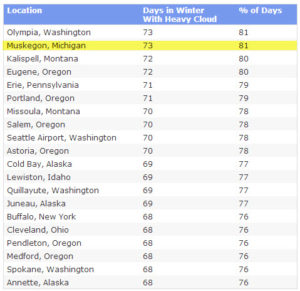
An added bonus to using separate video hardware from the 5.8GHz gear integrated into my goggles was that I could leave it – along with batteries, screen and DVR – on a tripod base station and relay the video to my goggles on 5.8GHz, leaving me free to walk around with no wires tethering me to anything. In the winter months, this means that I can set everything up outside, launch the plane, and then retire to the warmth of my car to fly it. How novel. More importantly, the RC receiver antenna will now remain in an optimal position at all times, rather than having its polarization left to the mercy of the way I held my controller.
Emergency Recovery:
1. Ground Recorder
I actually already had a DVR to record the wireless, standard-def flight footage as I view it in my goggles, but its importance should not be ignored. Often, those last few seconds of picture can mean the difference between cluelessness and a well-defined search area.
2. GPS Tracker
It’s truly amazing what $40 can buy these days. In this case, I am referring to the Chinese knock-off of the TK-102B cellular GPS tracker.
Sg6kENw~~60_35.JPG")
It may have the feel of a McDonald’s toy, software glitches that make some of the more advanced functions inoperable, and documentation that is better supplied by reverse-engineering, but it works. Slap in a GSM SIM card (H20 wireless sells them for $3.33/mo with full AT&T coverage), send a cryptic command over SMS, and $0.20 later, you have the position of your plane in degrees, minutes and seconds. I’m sure you can see how useful this is.
3. Lost Plane Finder Buzzer
Sometimes simple is best. Even with GPS coordinates, it can be difficult to locate a crash site in dense wilderness. I opted to solve this problem of the final 100m with a cheap HobbyKing buzzer that is activated with the plane’s failsafe. On failsafe, the RX channel this buzzer is connected to is set to +100, which triggers the buzzer. It serves a secondary purpose of detecting when there is even the briefest loss of control link – if the plane is anywhere nearby, it is clearly audible. The only thing I didn’t do is give this buzzer its own battery. This would be ideal, as in the event of a crash, the other electronics will likely continue to operate, depleting the main battery within the hour.
4. LEDs
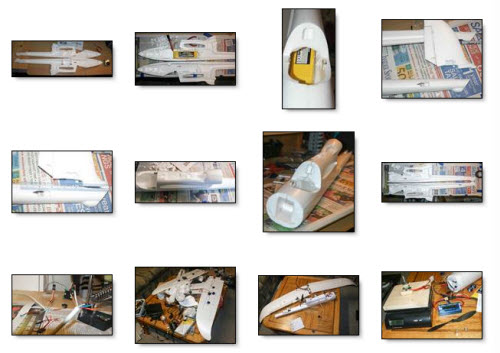
In addition to increasing visibility, looking cool, and opening the door for night flying, the LEDs I have integrated into my Skywalker build were also included to assist with finding it in the dark.
Results:
These changes yield a vastly more reliable platform. Rather than two separate points of failure, where either a video or a control link failure meant near-instant doom, the Skywalker has 4 layers of redundancy. It has better RF links, an autopilot to keep it in the air when those fail (and bring it back home), a DVR, lights and a buzzer to locate it if it goes down, and the ultimate last line of defense: a GPS satellite tracking system to allow recovery when all else fails. Further details on the Skywalker build are in the pipeline, along with – hopefully – some video to demonstrate the joys of FPV.